
Méthode PIL
Voici quelques éléments de compréhension sur la méthode Processor In the Loop (PIL) de Cerebrum Ingénierie.
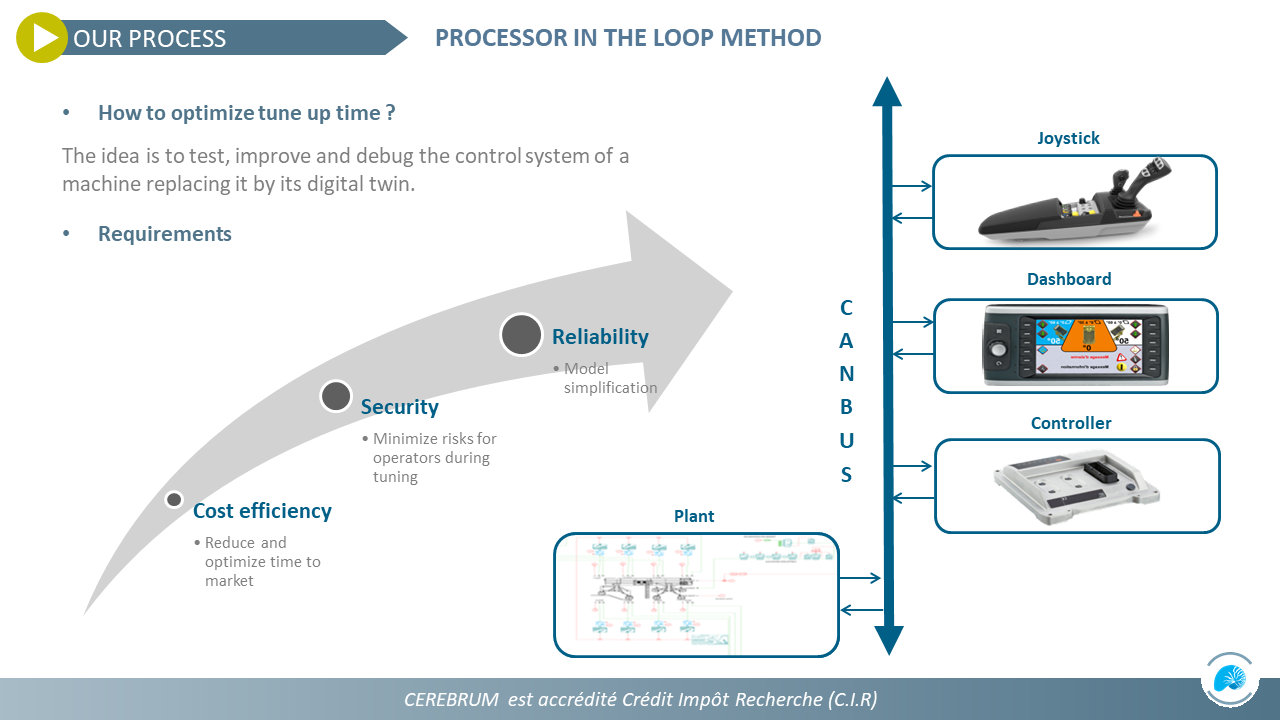
CEREBRUM Ingénierie a développé cette démarche que l'on peut placer entre le SIL (Software In the Loop) et le HIL (Hardware In the Loop). Pour ce faire un outil interne a été développé.
Cette démarche permet d'implémenter le code développé au préalable directement sur l'automate/le calculateur qui sera installé sur le système du client. Nos équipes peuvent ainsi anticiper et tester les idées des clients sans limite. Le code de l'automate communique ainsi avec le modèle virtuel et tout peut être testé et anticipé.
Cette démarche permet aux clients de gagner un temps considérable sur la mise au point des machines, 90% du travail est fait à l'avance et nous pouvons tester toutes les idées du client sans aucun risque. Il restera uniquement des réglages de confort à réaliser lors de la mise en route.
Deux variantes ont été développées afin de répondre parfaitement aux différents besoins exprimés : le PIL Synchrone et le PIL Asynchrone.
En détail :
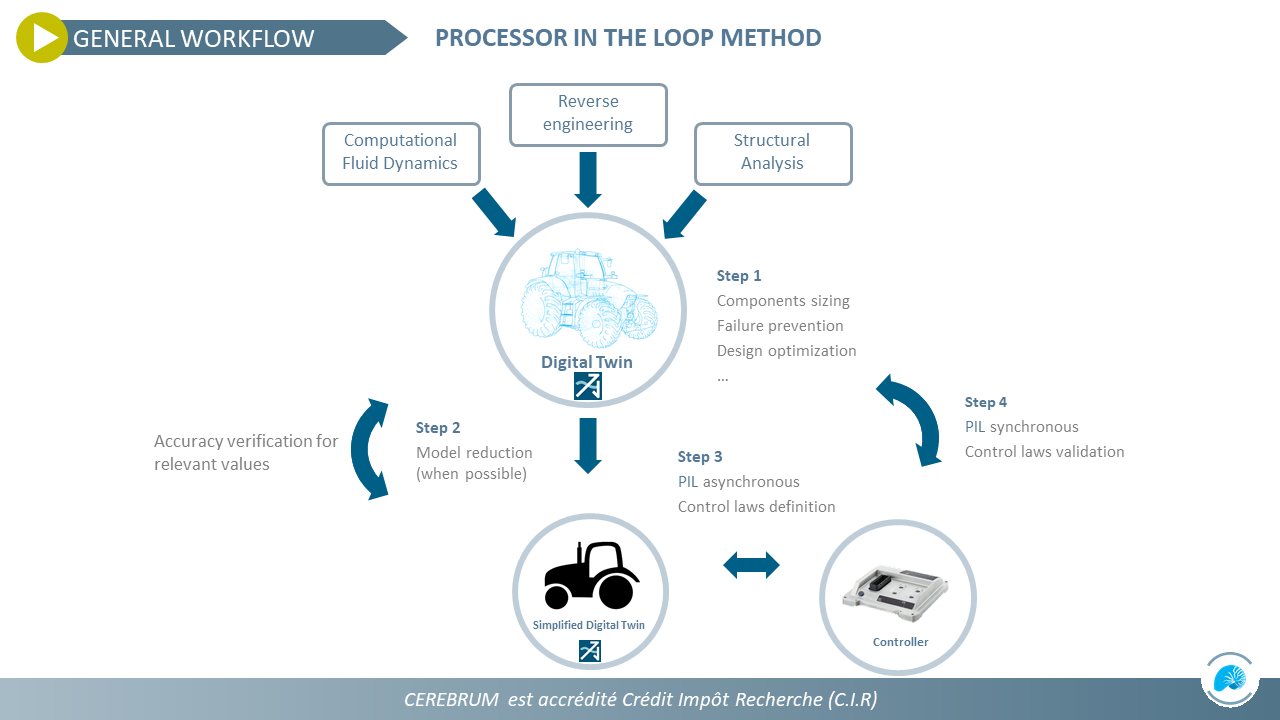
CEREBRUM Ingénierie met le modèle numérique au centre de sa démarche.
Le modèle peut être complété avec des données de reverse engineering, des résultats de CFD, d'analyse de structure... Ceci dans le but d'obtenir un modèle numérique plus précis.
Ensuite, nous dimensionnons les différents composants du système, optimisons les circuits, détectons les dysfonctionnements...
Pour entrer dans une démarche PIL et vérifier le contrôle commande, nous simplifions notre modèle afin d'avoir des temps de calculs industriels (entre 3 et 7 fois le temps réel) dans le cas d'un PIL Synchrone et un temps réel dans le cas d’un PIL Asynchrone. En parallèle, nous développons nos lignes de code (Python, C, C+, Bodas...), ou alors, nous intégrerons le code du client dans l'automate.
Afin de mieux comprendre, vous pouvez vous rapporter aux illustrations ci-dessous.
Différence entre le PIL Synchrone et le PIL Asynchrone
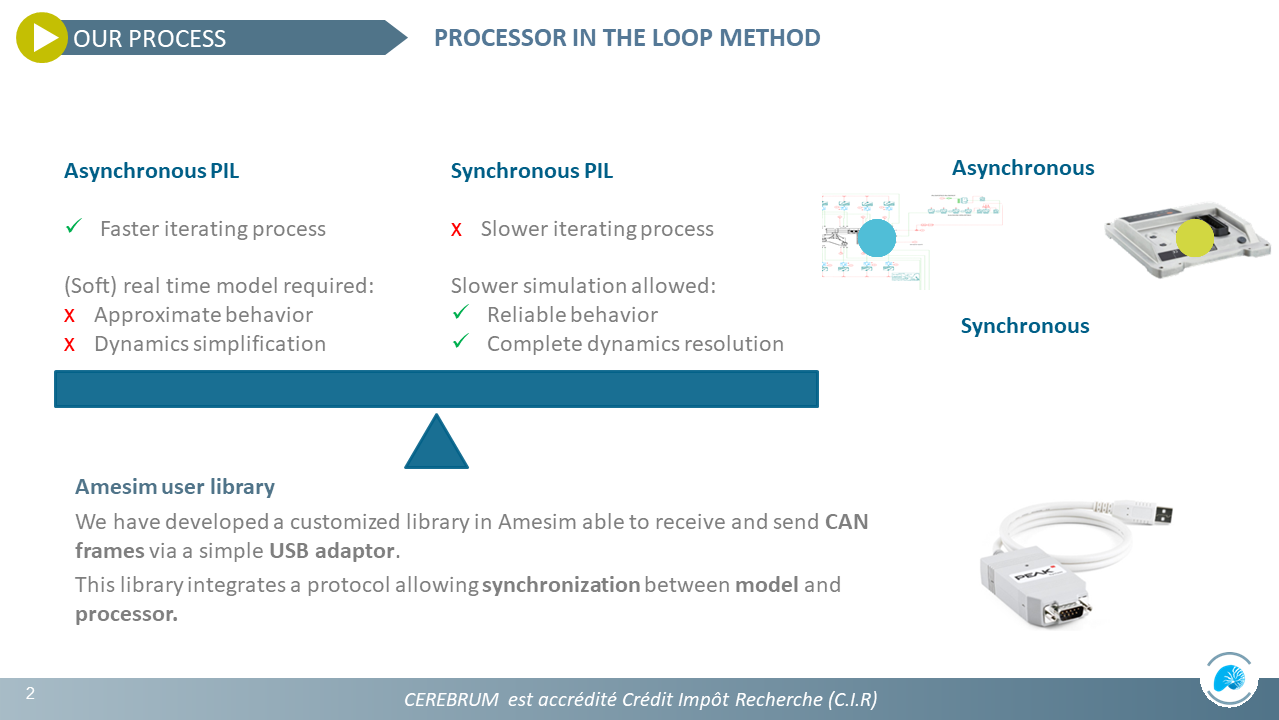
Le PIL Asynchrone permet d'avoir des résultats plus rapidement car le modèle a été simplifié et tourne en temps réel contrairement au PIL Synchrone qui génère des résultats plus lentement. Cependant, ce dernier reste dans des temps de calculs industriels (entre 3 et 7 fois le temps réel) et est plus précis, car le modèle garde une meilleure dynamique.
Le choix va dépendre des applications, par exemple lorsque que l'on doit gérer des zones d'intervention, le PIL Asynchrone est plus adapté. Si l'on recherche des résultats précis pour une mise en route sur une machine spéciale ... le PIL Synchrone sera plus cohérent.
Voici l'explication en vidéo :